论文: A Lightweight Tangible 3D Interface for InteractiveVisualization of Thin Fiber Structures
会议: SciVis 2013
作者: Bret Jackson, Tung Yuen lau, David Schroeder, Kimani C.Toussaint and Daniel F.Keefe
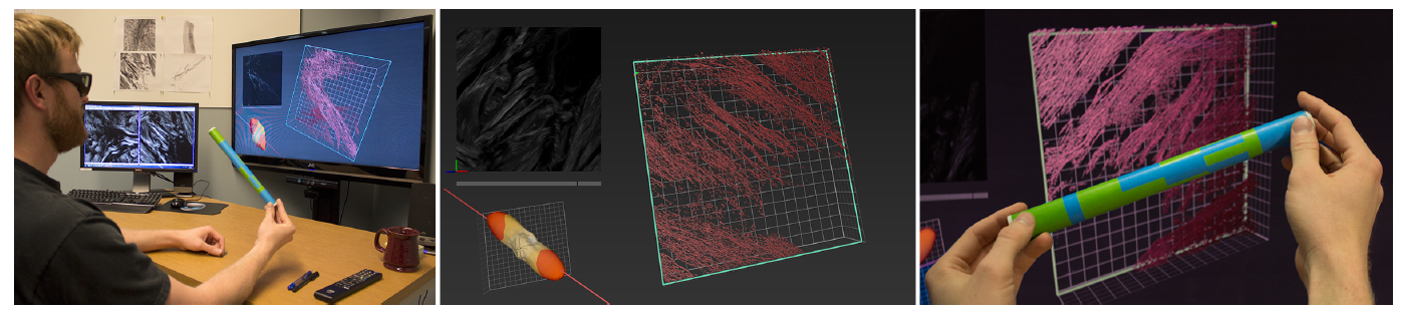
本文为了针对稀疏的纤维结构的体绘制结果,能够更好地观察到数据内部的分布情况,定向信息,提出了一种轻便的、基于实物道具的 3D 的交互手段。本文需要一个深度感应的相机设备和低成本的 3D 显示设备来实现本文的交互。本文的主要任务是可以帮助相关领域的专家更好地理解三维的纤维结构体内部的方向信息,来判断其衍化出来的各类信息。系统的设计和评论都与两名医学专家进行了合作。与在医学领域的传统交互相对比,本文的新可视化系统提供了一个钟更加有效的方法来检查和理解他们收集到的3D医学数据。
本文需要的硬件环境和界面视图
硬件: 3D 深度感知相机和廉价的3D展示设备
- Microsoft Kinect
- Prop 小道具
界面视图:
- 2D 切片图
- 3D 纤维取向分布直方图
- 纤维数据的立体渲染结果
本文的重点核心是提出了一种交互装置,因此,在文章中不断地从交互设计的角度出发进行分析和构思。在重要的关键—— Prop 小道具的设计和选择方面,要求有三点设计原则:
- 道具必须轻便 (Lightweight) 。
- 在任意的工作空间(如办公室)可以方便的取材制作。
- 设计的形状必须可以提供有效的方向坐标轴信息。
功能方面有三个必备功能:
- 可以提出一个需要查询数据的方向属性信息
- 可以设置标量的阈值
- 可以重新定位整个的 3D 的体绘制结果。
除此之外,本文的系统中可以在以上三种大的功能之间进行流畅的切换模式,不需要人为单独的进行选择模式。
下面三个图主要说明了三种交互功能使用方式
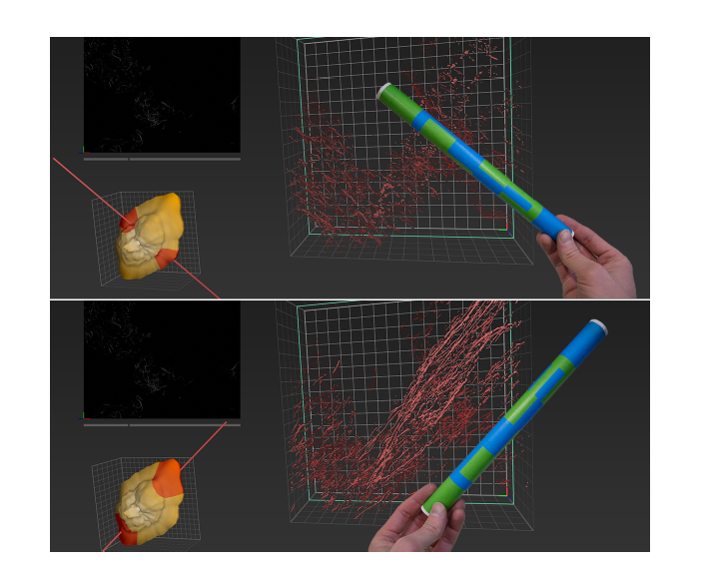
(a)
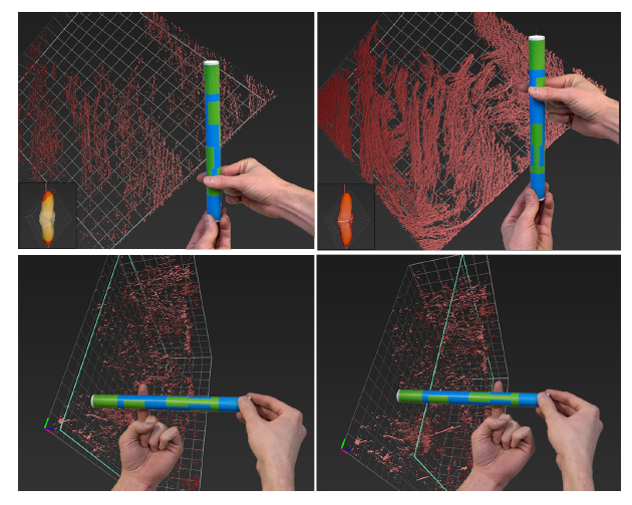
(b)
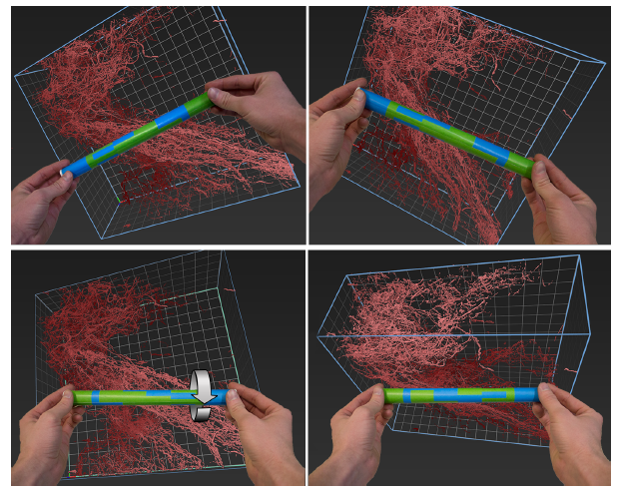
(c)
(a) 可以提出一个需要查询数据的方向属性信息。(b) 可以设置标量的阈值。(c) 可以重新定位整个的 3D 的体绘制结果。
实现
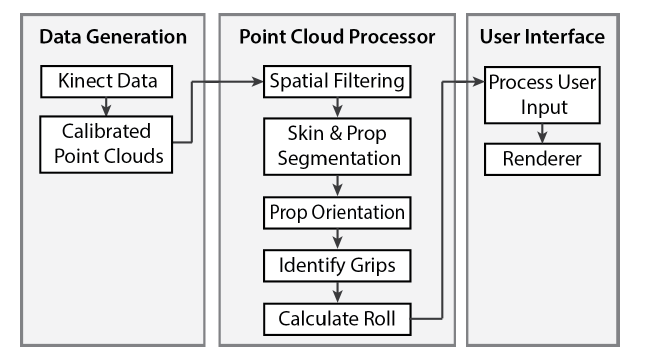
实现方面,本文通过 Microsoft Kinect 交互设备可以实时的采集到有效的点云数据 (Point Cloud) 通过筛选过滤这些点,来得到只有道具和操作的手的点云数据。然后对这些点云进行处理操作:(见上图左)
- 蓝色、绿色和手部颜色的分类来区别区域
- 识别道具的方向属性
- 判断 2cm 范围内的点的阈值,来判断是否是抓住道具的一端,来决定交互的功能选择
- 识别旋转操作(通过蓝绿色进行编码来进行识别)
- 识别手指的位置信息来设置阈值
除了交互部分,本文的另一大模块介绍是对于稀疏纤维结构的中心线的提取算法的更新和优化(见上图右)
- 欧氏距离来计算各个纤维点之间的相似度
- 通过计算三个点之间的相似度来初步得到第一层次的 Snakelets
- 针对每一个 Snakelet 不断地移动端点来提取中心线
- 通过合并邻近和重叠的 Snakelets 来得到最终的结构
总结
本文的贡献在于提出一种便于专家来理解交错的纤维三维组织数据信息的 3D 交互,通过交互的设计和实现和提取显微组织结构的中心线信息,得到纤维数据的分布情况,系统快捷流畅,道具轻便容易取材制作。但是,目前仍然受到一些硬件设备的局限性,不能达到非常灵敏和便捷,今后可以在材质和识别的灵敏度上做进一步的提高
✉️ zjuvis@cad.zju.edu.cn